I planen har vi stiftet bekendtskab med prikproduktet
for to vektorer. Ved hjælp af prikproduktet indførte vi begreber som
længden af en vektor og ortogonalitet. Længden af en vektor
blev defineret som
og to vektorer blev kaldt vinkelrette eller ortogonale hvis .
I dette kapitel indfører vi den oplagte generalisering af
prikproduktet fra planen til vilkårlige søjlevektorer
ved
Næsten alle definitioner fra generaliserer. Læg mærke til at
prikproduktet kan formuleres via
matrixmultiplikationen
svarende til for to vektorer .
For at udvide prikproduktet i (7.1) fra til
kan man ikke overtage definitionen uden ændringer.
For naturligt at kunne definere længden af en vektor har vi brug for at
. Dette er ikke
opfyldt for med definitionen i (7.1).
Allerede for gælder med . Heldigvis kan
vi reparere denne defekt ret enkelt ved at benytte den konjugerede
til et komplekst tal . Her er . Med disse forberedelser udvider prikproduktet til
som
hvor indgangene i den anden vektor er konjugerede.
Hvis for eksempel , så vil
og generelt kan man sige at
i denne forstand svarer til .
Moralen i dette kapitel er at lineær algebra bliver væsentligt mere
kraftfuldt (og spændende!), når vi har et prikprodukt at arbejde med.
Kommentarer/spørgsmål?
7.1 Definitioner og uligheder
For en matrix med indgange i de komplekse tal defineres
den komplekst konjugerede matrix som matricen
med indgangene konjugerede det vil sige
Læg mærke til at , hvis har indgange i de reelle
tal. Vi er nu i stand til at generalisere næsten alle begreberne vi
har for prikproduktet i planen.
Lad . Prikproduktet mellem og er defineret som
for og
Vektorerne og kaldes vinkelrette eller ortogonale og betegnes , hvis
Med prikproduktet defineret som følger
resultaterne af regneregler for matrixmultiplikation og konjugering
af komplekse tal og overlades til læseren.
Ud fra kun definitionen af prikproduktet kan vi lave overraskende meget
nyttig matematik, bland andet nedenstående resultat, som kaldes
Cauchy-Schwarz ulighed
Lad . Så gælder
Lighedstegnet gælder hvis og kun hvis en af og er et
multiplum af den anden, det vil sige, hvis og ikke er lineært uafhængige.
Med det komplekse prikprodukt har vi
for et vilkårligt komplekst tal ,
fordi for et komplekst tal . Hvis kan vi indsætte
i (7.2) og få
hvoraf uligheden følger.
Vi skal nu overveje hvornår denne ulighed faktisk er en lighed.
Hvis gælder lighed, og også at er lineært afhængige.
Vi kan altså antage at .
Hvis er lineært afhængige kan vi skrive for . Da er
så at vi har lighed. Antag omvendt at
. Da kan vi dividere med , så at vi kan definere
.
Ifølge (7.3) er
så at . Altså er et multiplum af .
Cauchy-Schwarz ulighed giver at
for to vektorer og det giver mening at definere vinklen
mellem dem ud fra
Dette tal benyttes under betegnelsen cosine similarity ofte som
et mål for korrelationen mellem to datasæt givet i form af de to
vektorer og .
For eksempel kan man benytte det som et mål for ligheden
mellem to tekster. Lad os som eksempel se på to tekster
Matematik er sjovt og lineær algebra er anvendeligt
Matematik er morsomt og lineær algebra er brugbart
Ud fra ordene i de to tekster laver vi følgende to vektorer i :
Matematik
1
1
er
2
2
sjovt
1
0
morsomt
0
1
og
1
1
lineær
1
1
algebra
1
1
anvendeligt
1
0
brugbart
0
1
\floatbarrier
hvor hvert ord i de to tekster har en koordinat, som tæller antal
forekomster af ordet i teksten. Et mål for ligheden mellem de to
tekster er cosinus til vinklen mellem de to vektorer. Jo tættere
cosinus til vinklen kommer på (svarende til en vinkel på
grader), jo tættere anser vi de to tekster at være på hinanden.
I ovenstående tilfælde er .
Beviset følger af Sætning 7.5 på følgende måde:
Ved lighedstegn må begge de to uligheder være ligheder, så at
Ifølge (β) og Sætning 7.5 må
for et . Ved at kigge nærmere på beviset, ser vi at
Vi sætter dette ind i (α):
Men hvis er et komplekst tal og så er
og , så
med . Dermed er
7.2 Matricer og prikproduktet
Prikproduktet giver anledning til at indføre nogle vigtige klasser af
matricer. Først en vigtig definition for komplekse matricer.
Den konjugerede transponerede af en matrix med komplekse indgange
er defineret som
det vil sige for og . Matricen kaldes
hermitesk hvis
En hermitesk matrix med reelle indgange kaldes symmetrisk.
For eksempel er
Læg også mærke til at hvis og kun hvis har reelle tal som indgange, netop fordi
gælder hvis og kun hvis .
En symmetrisk matrix opfylder altså også at .
En hermitesk matrix kan godt have det komplekse
tal som indgang i diagonalen.
er en hermitesk matrix.
er en hermitesk matrix.
er en hermitesk matrix.
er en hermitesk matrix.
7.2.1 Egenværdier og egenvektorer for hermiteske matricer
Nedenstående resultat viser hvordan prikproduktet opfører sig under
matrixmultiplikation på en af vektorerne. Beviserne for
formlerne gør brug af formlen for matricer og
hvor produktet giver mening.
Hvis en matrix opfylder at
for alle (eller ) så må .
Hvis er en matrix med reelle indgange, så gælder
for prikproduktet på .
Hvis er en matrix med komplekse indgange, så gælder
for prikproduktet på .
Påstanden i (α) følger af at
hvor er standardbasen for (eller ).
Påstanden i (β) følger af udregningen
Påstanden i (γ) følger på den samme måde af udregningen
En ekstremt vigtig observation er at selvom hermiteske matricer
generelt har komplekse tal som indgange så er deres egenværdier
reelle tal og egenvektorer hørende til forskellige egenværdier er
ortogonale. Dette er en meget stærk anvendelse af prikproduktet og
faktisk er beviset slet ikke så svært.
Lad være en hermitesk matrix og en egenværdi for
. Så er reel.
Lad være en egenværdi for med . Hvis
er en egenvektor hørende til og en egenvektor
hørende til , så gælder
Det vil sige at egenvektorer hørende til forskellige egenrum for er ortogonale.
For en egenvektor hørende til har vi
Dermed er og vi må have , fordi og dermed
Samme type argument giver ortogonaliteten af egenvektorerne og :
Denne identitet medfører ligningen
hvoraf , da .
Faktisk er det ret utroligt at hvis man stanger en vilkårlig symmetrisk matrix som for eksempel
ud, at dens karakteristiske polynomium kun kan have reelle rødder. Det er en af konsekvenserne af
Sætning 7.13.
At vise at en hermitesk matrix faktisk har en egenværdi overhovedet er
mere kompliceret. Her bliver vi nødt til at henvise til algebraens fundamentalsætning, som siger at ethvert polynomium af grad
har en kompleks rod.
Dette følger af definitionen på matrixmultiplikation opfattet på
følgende måde. Lad og være reelle matricer og lad
være søjlerne i . Så er søjlerne i netop
Altså er søjlerne i netop og dermed er
Hvis er en kompleks matrix, så er
tilsvarende indgangene i
netop (med det komplekse prikprodukt).
Lad os analysere hvordan en ortogonal matrix tager sig ud.
Antag at
Så er
Derfor er søjlevektorerne i ortogonale enhedsvektorer. Sætter vi og
har vi altså to muligheder for :
Geometrisk svarer til en drejning af planen, mens svarer
til en spejling. Ved eksplicit udregning ser man at er en
egenværdi for . En tilhørende egenvektor er retningsvektor for
linjen, som der spejles i (som viser sig at være linjen gennem
med vinklen med -aksen).
En unitær matrix er netop et komplekst tal med . Det vil sige
for en passende vinkel . For to komplekse tal
med er
et eksempel på en unitær matrix. Her kan man for eksempel benytte
for vilkårlige vinkler . For eksempel er
en unitær matrix svarende til .
Tre berømte unitære og hermiteske matricer er
I kapitlet om anvendelser vil prøve på at forklare hvorfor disse matricer er så berømte.
Determinanten af en ortogonal matrix kan være alle tal .
Determinanten af en ortogonal matrix er enten
eller .
Matricen, som repræsenterer en rotation omkring en akse gennem
i med hensyn til den naturlige basis er en ortogonal matrix.
Matricen
er ortogonal for en vinkel .
7.3 Anvendelser af ortogonalitet
At have et prikprodukt giver sig specielt udslag i udregningen af
baser for underrum. Pæne baser består af ortogonale vektorer.
Den første indikation på at ortogonale vektorer opfører sig specielt
pænt kommer her.
Hvis er vektorer med og for og
, så er lineært uafhængige det vil sige
hvis
for så medfører det
.
Lad være et underrum i . En basis for
kaldes en ortogonalbasis, hvis
for .
Hvis alle vektorerne i en ortogonalbasis er enhedsvektorer kaldes
basen en ortonormalbasis.
Et naturligt eksempel på en ortonormalbasis for består
af standardbasisvektorerne
men der er masser af andre spændende ortonormalbaser.
Nedenstående resultat viser at en ortonormalbasis opfører sig ligesom den
kanoniske basis i to vigtige henseender.
Lad være en ortonormal basis for et underrum og
lad . Så er
Vi ved at
for entydigt bestemte . Nu følger
hvilket viser første påstand, fordi for og
.
Den anden påstand følger af regneregler for prikproduktet:
hvor vi på samme måde har benyttet at for og
.
De tre vektorer
udgør en ortonormal basis for deres span i
. Det er nu under brug af Proposition 7.22
specielt nemt at afgøre om en forelagt vektor ligger
i . Dette sker hvis og kun hvis
Hvis for eksempel
er
og det fremgår at . Derimod har vi med
at
det vil sige .
Lad være underrummet i med en basis bestående af vektorerne
Hvilke af nedenstående udsagn er rigtigt?
er en ortogonalbasis for .
er en ortonormalbasis for .
.
er en ortonormalbasis for .
7.3.2 Gram-Schmidt algoritmen
Vi har set ovenfor at ortonormalbaser for underrum er specielt nemme
at regne med. Spørgsmålet er om alle underrum har en ortonormalbasis.
Her er svaret ja og grunden ligger i en klassisk og smuk algoritme
tilmed opfundet af en dansker. Ideen kommer fra formlen for projektion
af en vektor på en anden i planen.
Lad os kaste et blik igen på tegningen
som forekom i Kapitel 1 i
forbindelse med formlen for projektion af en vektor på en anden
vektor. Givet to vektorer med fandt vi ud af at hvis et
tal opfylder
så må
Argumentet for dette var løsning af en førstegradsligning!
Her er førstegradsligningen, som kommer fra betingelsen
(7.4) og hvis løsning er ovenstående :
Læg mærke til at disse udregninger er fuldstændigt uafhængige af om vi regner
i de reelle eller komplekse tal.
Teknikken ovenfor kan benyttes til at omforme to vektorer
til to vektorer
så er ortogonal på samt
Man kan endda gå et skridt videre med tre eller flere vektorer: Lad os
antage for tre vektorer at og allerede er
ortogonale det vil sige .
Kan vi erstatte med en vektor i så
bliver ortogonal på og ? Med input fra tilfældet med
to vektorer viser formlen sig at blive
Det overlades som en øvelse at indse at og
.
Animation af den modificerede Gram-Schmidt algoritme for tre vektorer fra
Wikipedia. Læg mærke til at prikproduktet noteres som i animationen.
Ovenstående procedure kan generaliseres fra to og tre vektorer til et
vilkårligt antal vektorer. Denne generalisering blev først fundet
af danskeren Jørgen Pedersen Gram
i 1883 og kendes i dag under navnet Gram-Schmidt algoritmen
. Algoritmen er angivet i sætningen nedenfor. Det er en af de helt fundamentale algoritmer i lineær algebra.
Lad være lineært uafhængige vektorer i og lad
Ved algoritmen
opnås ortogonale vektorer så at og
Således har ethvert underrum en ortogonalbasis og (dermed) en ortonormalbasis.
Undervejs i algoritmen viser man ved ren og skær udregning med
prikproduktet at den nyligt konstruerede vektor opfylder
samt
At ikke kan forekomme er på grund af antagelsen om lineær
uafhængighed blandt vektorerne . Hvis ville
i strid
med at vektorerne er lineært uafhængige.
Hvis Sætning 7.25 benyttes på et sæt af vektorer, som ikke er
lineært uafhængige, vil algoritmen undervejs afsløre dette og give
, hvor
Algoritmen kan modificeres ret enkelt ved at springe trin med
over og arbejde videre med ud fra de allerede
fundne ortogonale vektorer .
En anden enkel modifikation er at normalisere vektorerne undervejs til
enhedsvektorer ved at udskifte med . Dette leder
frem til en ortonormalbasis. Man kan også normalisere de ortogonale
vektorer til sidst som i eksemplet nedenfor.
Vi betragter underrummet i med basis bestående af vektorerne
og vil benytte Gram-Schmidt algoritmen til at finde en ortonormalbasis for .
Vi indleder med at finde en ortogonalbasis for . Første trin er
. Dernæst udregner vi
Så vidt så godt. Man checker at . Sidste skridt er nu udregningen af
via
Hermed er en ortogonalbasis for . Da og
vil
være en ortonormalbasis for .
7.3.3 Den modificerede Gram-Schmidt algoritme
Gram-Schmidt algoritmen som angivet ovenfor er numerisk
ustabil i
praksis. Ved en lille
modifikation med hensyn til udregningen af fås en numerisk stabil
algoritme, som er mindre følsom overfor afrundingsfejl. Dette modificerede trin består i at udregne gennem følgende
kæde af operationer:
med som resultat.
Lad os benytte vektorerne
fra sidste eksempel som input til den modificerede Gram-Schmidt
algoritme. Første skridt giver
Udregningen af foregår som
med
Udregningen af foregår som
og
med endeligt resultat
i fin overensstemmelse med Eksempel 7.26.
Denne algoritme kaldes den modificerede Gram-Schmidt algoritme. Den numeriske stabilitet
illustreres i eksemplet (hentet fra MIT OpenCourseWare) nedenfor.
For at uddybe hvad der egentlig menes med numerisk stabil eller
mindre følsom overfor afrundingsfejl kan man som eksempel afprøve
Gram-Schmidt algoritmen og den modificerede Gram-Schmidt algoritme
på vektorerne
med afrundingsfejlen . Hvis en lommeregner for eksempel
kan vise cifre i displayet og så er
på lommeregneren.
Med afrunding og normering i hvert trin giver den klassiske
Grams-Schmidt algoritme resultatet
Læg mærke til at , hvilket er en grim fejl som følge af afrundingen.
Derimod giver den modificerede Grams-Schmidt algoritme resultatet
Her er .
7.3.4 QR dekomposition
Hvis vi benytter Gram-Schmidt algoritmen på søjlerne
i en invertibel matrix fås
Ved at ortonormalisere basen og sætte fås nu
Oversat giver det matrix identiteten
hvor er matricen med søjler og
Læg mærke til at matricen er ortogonal fordi dens søjler udgør en
ortonormal basis samt at
er en øvre trekantsmatrix (den har nuller under diagonalen). Vi har vist
følgende.
En invertibel matrix kan skrives som produkt
af en ortogonal matrix og en øvre trekantsmatrix.
En faktorisering af en matrix som produkt af en
ortogonal matrix og en øvre trekantsmatrix kaldes en
QR dekomposition af .
Matricen
er en invertibel matrix. Ved hjælp af Gram-Schmidt
algoritmen finder man med input fra søjlerne i matricen
indeholdende den ortonormale basis
med QR dekompositionen
som følge.
7.3.5 Den mirakuløse QR-algoritme
Det meste lineære algebra er langtidsholdbart matematik og flere hundrede
år gammelt. Det hænder dog at ekstremt vigtige nye opdagelser bliver
gjort for eksempel ved at eksperimentere med computere. Følgende næsten
halvnaive algoritme til at udregne egenværdier for en kvadratisk
matrix blev opdaget sidst i 1950'erne. Den hedder
QR algoritmen og
bygger netop på QR dekompositionen.
Indledningsvis sættes og algoritmen udregner nye QR
dekompositioner i hvert trin med hensyn til det modsatte produkt af og fra
foregående trin:
Læg her mærke til at og har de samme egenværdier, fordi
de er ``konjugerede'':
Her har vi brugt at vi ved at den ortogonale matrix er inverterbar.
Hvorfra ved vi forresten det? Jo, fordi , så . Under alle omstændigheder, hvis er en egenvektor til med egenværdi , så er en egenvektor til med den samme egenværdi .
Oftest vil diagonalelementerne i konvergere mod egenværdierne i
den oprindelige matrix .
Betragt matricen
fra Eksempel 7.30. Man kan ret nemt regne ud at har egenværdierne
og .
Lad os afprøve QR algoritmen rent numerisk på . De første trin giver
Eksperimentet synes at bekræfte at diagonalelementerne (markeret med rødt) i følgen af
de øvrige trekantsmatricer i QR dekompositionerne konvergerer mod
egenværdierne af den oprindelige matrix.
7.3.6 Ortogonalkomplement og ortogonalprojektion
Man har ofte brug for en anelse mere terminologi omkring underrum og
ortogonalitet, herunder ortogonalkomplement og ortogonalprojektion.
For et underrum i knytter der sig et komplementært underrum med hensyn til
prikproduktet. Dette underrum er defineret ved
og kaldes ortogonalkomplementet til .
At er et underrum følger af
egenskaberne ved prikproduktet givet i Proposition 7.4.
Et underrum i er givet ved en basis .
Ud fra denne basis kan en basis for ortogonalkomplementet udregnes
som en basis for , hvor er matricen med søjler .
Dette følger af observationen at opfylder for alle
hvis og kun hvis
fordi alle kan skrives og
hvis er en løsning i (7.6).
Skrevet i matrixnotation svarer ligningssystemet (7.6) præcis til
. Derfor er .
Lad være et underrum af . Enhver vektor kan på
entydig måde skrives
hvor og : Hvis og med
så er og .
Hvis er en ortonormal basis for , så gælder
Derfor gælder
med
Fremstillingen i (7.8) er entydig. Hvis
så er . Men da , så er
. Det følger at
. Formuleret på en anden måde er .
I opskrivningen (7.7) kaldes ortogonalprojektionen af på .
Begreberne kan endnu en gang forstås gennem den centrale figur nedenfor
i tilfældet .
Med er ortogonalprojektion af på og
ortogonalkomplementet til er underrummet .
Ortogonalprojektion af en vektor på et underrum fås
ved hjælp af en ortonormalbasis for for som
Da , fordi , bliver den entydige opskrivning fra (7.7) hermed
I Eksempel 7.23 betragtede vi underrummet af med
Bemærk igen at er en ortonormalbasis for . Her er
da vi ved at (hvorfor?). I Eksempel 7.23 fandt vi
ud af at , hvor
Vi udregnede i eksemplet også
Denne vektor er ortogonalprojektionen af på i henhold til Bemærkning 7.36.
7.4 Mindste kvadraters metode
Kommentarer/spørgsmål?
Mindste kvadraters metode kendes nok
bedst fra problemet om at bestemme den bedste rette linje gennem nogle
punkter i planen. Faktisk er den langt mere generel og drejer sig om
at finde approksimative løsninger til overbestemte
ligningssystemer. Metoden blev opfundet af Gauss og brugt første gang i forbindelse med
bestemmelse af baner for himmellegemer ud fra tre observationer .
Det er ikke altid et ligningssystem
med en matrix og en matrix har en
løsning, og det er heller ikke altid at denne løsning er entydig.
Hvis for eksempel , det vil sige at der er mange flere ligninger end ubekendte, og
hvis og er ''tilfældige'', så vil med overvældende sandsynlighed følgende to ting gælde:
Ligningen har ikke nogen løsning.
Den homogene ligning har kun den ene løsning .
Det lyder jo ikke særlig lovende.
I denne situation kan vores
forventning til at vi kan finde en løsning ligge på et meget lille sted, og det bedste vi kan gøre er
at søge en vektor så at kommer tættest muligt på .
Ligningssystemet
er et ligningssystem med ligninger og ubekendte. Det
har ingen løsninger.
For at præcisere hvad der menes med tættest på indføres følgende definition.
En
mindste kvadraters løsning til ligningssystemet , med en matrix og en , er en vektor ,
som opfylder
for alle .
Læg mærke til at en mindste kvadraters løsning opfylder at
for alle .
er det valg af så at er tættest på for alle mulige valg af .
Jeg bliver lige overrasket hver gang over at
dette minimeringsproblem har så smuk en løsning ved hjælp af lineær
algebra. En vigtig ingrediens er generaliseringen af Pythagoras
til dimensioner.
Et ligningssystem , hvor er en matrix og
en matrix, har altid en mindste kvadraters løsning
.
En løsning kan findes som løsning til ligningssystemet
Antag nu at ligningen ikke har andre løsninger end . Da er
der kun en eneste mindste kvadraters løsning. Desuden er matricen invertibel,
og den entydigt bestemte løsning kan udregnes ved formlen
Betingelse at kun har nulløsningen kan på en mere fancy måde
udtrykkes ved at dimensionen af nulrummet er 0. Ifølge
dimensionssætningen i Kapitel 6 er dette det samme som at
rangen af matricen er .
Vi viser at der altid findes en løsning.
En helt central observation er at vi kan finde så
er ortogonal på søjlerne i .
Dette er en
følge af Gram-Schmidt algoritmen: Hvis er en
ortonormal basis for søjlerummet for , så vil
opfylde at er ortogonal på og dermed
ortogonal på søjlerne i . Da ligger i søjlerummet for
kan skrives som for passende . Et
sådant vil være en mindste kvadraters løsning.
Vi forklarer hvorfor.
Da vektoren er ortogonal på alle søjler i ,
er den ortogonal på alle vektorer af formen .
Specielt gælder det at for enhver vektor er de to vektorer
og ortogonale. Ved at bruge
Proposition 7.40 finder vi at
Derfor gælder
for alle .
Nu vil vi vise at det som vi lige har fundet løser ligningen .
Vi arbejder videre ud fra vores nyvundne viden om at skal være ortogonal
på alle vektorer af formen . Dette betyder at, for alle ,
og dermed (husk at )
Dette vil gælde for alle . Nu bruger vi et beskidt men nyttigt kneb:
Vi sætter ind og får at
Det følger at
eller
Fra nu af antager vi at kun har den trivielle nulløsning.
Vi vil vise påstanden om entydighed. Hvis er den løsning som vi fandt i de foregående trin, og er en anden mindste kvadraters løsninger, så har vi jo lige set at
er ortogonal på . Igen følger det
af Pythagoras:
Hermed er og dermed og .
Så hvis ligningen kun har den trivielle løsning, så er .
Til sidst skal vi vise at er invertibel. Dette gør vi ved at
vise at antage at
og vise at dette medfører at (se den relevante sætning i Kapitel 4).
Det kan vi gøre med denne fikse udregning:
Da er , og det følger fra vores antagelse om at .
Lad os finde en mindste kvadraters løsning for ligningssystemet
fra Eksempel 7.38. Her er
som ved indsættelse i (7.9) giver mindste kvadraters løsningen
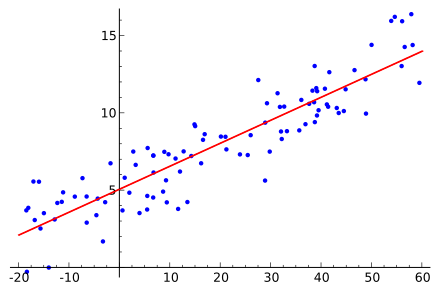
Den helt klassiske anvendelse af mindste kvadraters løsninger er at finde den bedste
linje gennem nogle givne punkter
i planen .
At det oftest ikke er muligt at finde en perfekt linje, som går gennem alle punkterne kan
oversættes til at ligningssystemet
ikke har løsninger. Her kan vi så arbejde med en mindste kvadraters løsning, som giver
den bedste linje gennem punkterne i den forstand at summen af
den vertikale kvadratafstand fra linjen til -erne
bliver minimal.
Bedste fit af linje til tilfældige punkter fra Wikipedia.
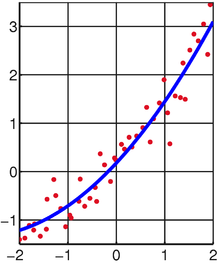
Faktisk kunne vi ligeså godt have spurgt om den bedste parabel
gennem punkterne
i . Dette ville med samme metode give os ligningssystemet
og mindste kvadraters løsningen til dette ligningssystem ville give
den bedste parabel gennem punkterne med summen af den vertikale
kvadratafstand fra parablen til punkterne minimeret.
Bedste fit af parabel til tilfældige punkter fra Wikipedia.
Helt generelt kan den samme metode bruges til at finde det bedste
eller fitte et -te grads polynomium
til en række punkter i planen.
7.5 Opgaver
7.5.1
Gør rede for at og er egenværdier for matricen
hvor er en vilkårlig vinkel. Forsøg at bestemme egenvektorerne.
7.5.2
Gør rede for at
hvor og er to matricer, hvor produktet giver mening. Vis yderligere at
7.5.3
Find den bedste mindste kvadraters linje gennem
punkterne og ved at benytte Sætning 7.41.
7.5.4
En cirkel med centrum i og radius i planen har ligningen
Gør rede for hvordan (7.10) kan omskrives til ligningen
hvor .
Forklar hvordan (7.11) i mindste kvadraters kontekst leder frem
til ligningssystemet
i forsøget på at tilpasse en cirkel til punkterne
i planen.
Find den bedste cirkel i mindste kvadraters forstand gennem
punkterne
ved at angive centrumkoordinaterne og radius med to decimaler.
Diskuter hvornår der går en entydig cirkel gennem tre givne punkter
og i henhold til egenskaber
ved matricen
Kan man finde en cirkel gennem tre ikke sammenfaldende punkter, som ligger på en linje?
7.5.5
Bestem vinklen mellem vektorerne
7.5.6
Hvor tæt er de to sætninger
Jeg vil gerne have et glas vand
Jeg vil gerne have et glas vin
på hinanden?
7.5.7
Find den inverse til matricen
uden at regne.
7.5.8
Gør detaljeret rede for at
er en ortogonalbasis for underrummet
af . Benyt derefter Proposition 7.22 (og Eksempel 7.23) til at afgøre om
Skriv matricen
som et produkt , hvor er en ortogonal matrix og en øvre
trekantsmatrix (en matrix, som har nuller under diagonalen). Gør rede for dine udregninger og metoder.
Find en ortogonal matrix så
 som forekom i Kapitel 1 i
forbindelse med formlen for projektion af en vektor på en anden
vektor. Givet to vektorer med fandt vi ud af at hvis et
tal opfylder
så må
Argumentet for dette var løsning af en førstegradsligning!
Her er førstegradsligningen, som kommer fra betingelsen
(7.4) og hvis løsning er ovenstående :
Læg mærke til at disse udregninger er fuldstændigt uafhængige af om vi regner
i de reelle eller komplekse tal.
som forekom i Kapitel 1 i
forbindelse med formlen for projektion af en vektor på en anden
vektor. Givet to vektorer med fandt vi ud af at hvis et
tal opfylder
så må
Argumentet for dette var løsning af en førstegradsligning!
Her er førstegradsligningen, som kommer fra betingelsen
(7.4) og hvis løsning er ovenstående :
Læg mærke til at disse udregninger er fuldstændigt uafhængige af om vi regner
i de reelle eller komplekse tal.