9Indre produkt og ortogonalitet
I planen har vi i Kapitel 1 set på det Euklidiske indre produkt (kaldes også nogle gange prikprodukt eller skalarprodukt) for to vektorer. Ved hjælp af det indre produkt indførte vi begreber som normen (længden) af en vektor og ortogonalitet. Normen af en vektor blev defineret som og to vektorer blev kaldt vinkelrette eller ortogonale hvis .I dette kapitel indfører vi den oplagte generalisering af det indre produkt fra planen til vilkårlige søjlevektorer i . Her skal man være særlig opmærksom på at der for komplekse tal også indgår en kompleks konjugering, som er helt essentiel for at vi kan tale om længden af en kompleks vektor. Vi husker at konjugeringen af et komplekst tal er givet ved at skifte fortegn på imaginærdelen og vi husker at der helt særligt fås et reelt tal (modulus af i anden potens) når et komplekst tal ganges med sin konjugerede
Lad . Det (Euklidiske) indre produkt mellem og er defineret som
Vektorerne og kaldes ortogonale, skrevet , hvis
Normen (længden) af er defineret som
En vektor kaldes en enhedsvektor hvis .
Hvilke af nedenstående udsagn er rigtige, for det indre produkt i Definition 9.1?
Hvis er
9.1 Egenskaber for indre produkter og normer
Der gælder følgende helt essentielle egenskaber for det Euklidiske indre produkt.
Lad og . Så gælder
- og hvis og kun hvis .
Med det indre produkt defineret som følger
resultaterne af regneregler for matrixmultiplikation og konjugering
af komplekse tal og overlades til læseren som en øvelse.
Når egenskaberne ovenfor blev kaldt helt essentielle, er det fordi disse egenskaber faktisk er definitionen af hvad et generelt indre produkt skal opfylde. Det er muligt at definere indre produkter på andre typer af vektorrum end for søjlevektorer, eksempelvis på vektorrum af polynomier eller kvadratisk integrable funktioner. Hovedessensen er, at de ovenstående egenskaber er nok til at kunne vise mange af resultaterne i dette kapitel med brug af indre produkter på abstrakte vektorrum; eksempelvis kan Gram-Schmidt algoritmen også anvendes til at bestemme ortogonale funktioner, som er en vigtig del af teorien bag signalbehandling.
Lad . Så gælder
Hvis er uligheden sand, da der står på begge sider. Antag nu at , så kan vi bestemme den ortogonale projektion af på ved brug af formlen i (9.1), således at og .Nu kan vi lave en udregning hvor udtrykket for indsættes:
Nu kan vi gange igennem med på begge sider, for derefter at tage kvadratroden, for at få
Lad . Prøv at bevise
uden at bruge Sætning 9.5. Lykkedes det? Hvis ikke, prøv med.
Ud fra Cauchy-Schwarz ulighed kan vi udlede
trekantsuligheden.
For to vektorer gælder
Vi starter med at minde om nogle egenskaber for komplekse tal. Først har vi at og dernæst har vi også at
Ved en udregning får vi derfor
Beviset følger nu ved brug af Sætning 9.5:
For ortogonale vektorer, i , gælder
Beviset er en direkte udregning, hvor sammenhængen mellem indre produkt og norm udnyttes:
9.2 Ortonormalbaser
De fleste kan godt lide at bruge standard basen for , på grund af de flotte geometriske egenskaber den har. Hver vektor peger ud af akserne i det typiske retvinklede koordinatsystem, og koordinaterne til vektor kan direkte aflæses fra vektorens indgange. Vi har nemlig Det at vi kan ''aflæse'' koordinaterne nemt, svarer præcis til udregningen af koordinatvektoren ved de indre produkter . Dette er betydelig lettere end at skulle løse et ligningssystem for at finde en koordinatvektor. Vi skal se at denne lettere måde at finde koordinater på hænger sammen med ortogonalitet af basisvektorerne.Først skal vi overbevise os selv om, at ortogonale vektorer er lineært uafhængige, hvilket fra et geometrisk synspunkt nok ikke er så overraskende.
Hvis er indbyrdes ortogonale vektorer, for alle , og ingen af vektorerne er nulvektorer, så er lineært uafhængige.
For at undersøge lineær uafhængighed af vektorerne, ser vi på en linearkombination
for nogle tal . Af ortogonaliteten får vi derfor
for hvert indeks . Det betyder, at hvis , så kan vi konkludere at hvert for da var en af antagelserne i sætningen. Det betyder at den eneste linearkombination af som kan give er hvis alle koordinaterne er 0, altså er vektorerne lineært uafhængige.
- En basis for et vektorrum kaldes en ortogonalbasis hvis for alle .
- Hvis en ortogonalbasis består af enhedsvektorer, for alle , så kaldes det en ortonormalbasis (ONB).
Lad være en ONB for et vektorrum . For ethvert gælder
Lad være koordinatvektor for med hensyn til
Nu følger af ortonormaliteten at
hvilket viser første påstand om at koordinaterne er givet ved de indre produkter.Den anden påstand følger af regneregler for det indre produkt:
hvor vi på samme måde har benyttet at for og
.
De tre vektorer
udgør en ONB for deres span, i
. Dette ses ved at vektorerne er normaliserede og ortogonale (tjek det gerne!) samt af Sætning 9.9. Det er nu ikke så kompliceret at bruge Proposition 9.11 til at afgøre om en vektor ligger
i . Dette sker hvis og kun hvis
Hvis for eksempel
er
hvilket tydeligvis ikke er lig , og derfor har vi . Derimod har vi med
at
det vil sige .
Lad være underrummet i med en basis bestående af vektorerne
Hvilke af nedenstående udsagn er rigtigt?
er en ortogonalbasis for .
er en ONB for .
.
er en ONB for .
9.3 Gram-Schmidt algoritmen
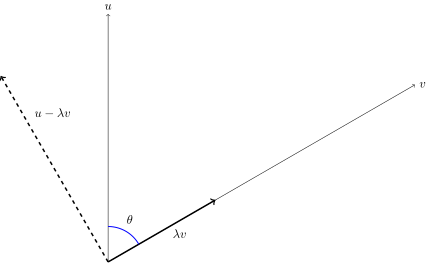
Vi har set ovenfor at ONB'er er specielt nemme at regne med. Spørgsmålet er om alle underrum af har en ONB? Her er svaret ja og grunden ligger i en klassisk og smuk algoritme tilmed opfundet af en dansker. Ideen kommer fra formlen for projektion af en vektor på en anden vektor, som vi genopfriskede i (9.1).Hvis er en ortogonalbasis for et vektorrum , så kan vi finde en ONB ved at normalisere Ved at sætte dette ind i Proposition 9.11, får vi den tilsvarende formel for koordinaterne i en ortogonalbasis Hvis vi kigger på de enkelte led, og sammenligner med (9.1), så ser vi at er summen af de ortogonale projektioner af på henholdsvis , , , . En måske vigtigere observation fra (9.3), er at vi kan finde komponenten af i én ortogonal retning ved at trække alle de andre ortogonale projekterne fra . For eksempel er det sidste komponent Dette er princippet der ligger bag Gram-Schmidt algoritmen: Tag en basis for et vektorrum, og lav nye vektorer hvor vi induktivt trækker ortogonalprojektioner fra til at danne en ny ortogonalbasis for det samme vektorrum.
Lad være lineært uafhængige vektorer i og lad
Ved algoritmen
opnås ortogonale vektorer så at og
En ONB basis for opnås ved at normalisere basisvektorerne:
Fra ortogonal projektionerne har vi for hvert at for . Givet to indeks med , har vi altså enten at eller . I begge tilfælde får vi derfor at . Altså er ortogonale vektorer.Fra processen i (9.4) ser vi at -vektorerne er linearkombinationer af -vektorerne (indsæt udtrykkende for i højresiden). Tilsvarende, ved at flytte de ortogonale projektioner til venstresiden i (9.4), ser vi også at -vektorerne er linearkombinationer af -vektorerne. Det betyder altså at
Da er en basis for er , og derfor må også være en basis for .
Vi betragter underrummet i udspændt af vektorerne.
Vi benytter Gram-Schmidt algoritmen til at finde en ONB for . Første trin er
. Dernæst udregner vi
Så vidt så godt; man kan tjekke efter for regnefejl ved at undersøge om . Sidste skridt er nu udregningen af
via
Hermed er en ortogonalbasis for . Da og
vil
være en ONB for .
9.3.1 Den modificerede Gram-Schmidt algoritme
Gram-Schmidt algoritmen som angivet ovenfor er numerisk ustabil i praksis. Ved en lille modifikation med hensyn til udregningen af fås en numerisk stabil algoritme, som er mindre følsom overfor afrundingsfejl. Dette modificerede trin består i at udregne gennem følgende kæde af operationer: med som resultat. Eksempel
Lad os benytte vektorerne
fra sidste eksempel som input til den modificerede Gram-Schmidt
algoritme. Første skridt giver
Udregningen af foregår som
med
Udregningen af foregår som
og
med endeligt resultat
i fin overensstemmelse med foregående eksempel.
Denne algoritme kaldes den modificerede Gram-Schmidt algoritme. Den numeriske stabilitet
illustreres i eksemplet (hentet fra MIT OpenCourseWare) nedenfor.
For at uddybe hvad der egentlig menes med numerisk stabil, eller
mindre følsom overfor afrundingsfejl, kan man som eksempel afprøve
Gram-Schmidt algoritmen og den modificerede Gram-Schmidt algoritme
på vektorerne
med afrundingsfejlen . Hvis en lommeregner for eksempel
kan vise cifre i displayet og så er
på lommeregneren. Med afrunding og normering i hvert trin giver den klassiske
Grams-Schmidt algoritme resultatet
Læg mærke til at , hvilket er en grim fejl som følge af afrundingen, som ikke afhænger af hvor lille bliver.Derimod giver den modificerede Grams-Schmidt algoritme resultatet
Her er .
9.4 Unitære og ortogonale matricer
For en kompleks matrix er den kompleks konjugerede af . Det svarer til at konjugere hver af indgangene i matricen, som set nedenfor:
Hvad gælder for kompleks konjugering af en matrix?
For to matricer og , hvor matrixproduktet giver
mening gælder
For to matricer og , hvor matrixproduktet giver
mening gælder
For matrix definerer vi den konjugerede og transponerede matrix
For eksempel er
Som vi kender det fra transponering af matricer, kan vi bestemme den konjugerede og transponerede af et produkt ved formlen
Herudover kan vi også se, at en anden måde at skrive det Euklidiske indre produkt af to vektorer , er
Ved at kombinere de to ovenstående principper, får vi en meget vigtig egenskab.
Lad være en matrix, og . Så gælder
En matrix kaldes en unitær matrix hvis .Hvis herudover er en reel matrix, så vi har , kaldes den i stedet for en ortogonal matrix.
En matrix er unitær netop hvis dens søjler er ortonormale.
Dette følger af definitionen på matrixmultiplikation opfattet på
følgende måde. Lad og være komplekse matricer og lad
være søjlerne i . Så er søjlerne i netop
Altså er søjlerne i netop og dermed er
Kravet om , er nu ensbetydende med at
altså at søjlerne i er ortonormale.
Lad os analysere hvordan en ortogonal matrix tager sig ud.
Antag at
Så er
Derfor er søjlevektorerne i ortogonale enhedsvektorer. Sætter vi og
har vi altså to muligheder for :
Geometrisk svarer til en rotation af planen, mens svarer
til en spejling. Ved eksplicit udregning ser man at er en
egenværdi for . En tilhørende egenvektor er retningsvektor for
linjen, som der spejles i (som viser sig at være linjen gennem
med vinklen med -aksen).En unitær matrix er netop et komplekst tal med . Det vil sige
for en passende vinkel . For to komplekse tal
med er
et eksempel på en unitær matrix. Her kan man for eksempel benytte
for vilkårlige vinkler . For eksempel er
en unitær matrix svarende til .Tre berømte unitære matricer er
som indgår i beskrivelsen af sammenhængen mellem en partikels spin og et elektromagnetisk felt inden for kvantemekanik.
Hvilke af nedenstående udsagn er rigtige?
Determinanten af en ortogonal matrix kan være alle tal
Determinanten af en ortogonal matrix er enten
eller
Matricen som repræsenterer en rotation omkring en akse gennem origo
i , med hensyn til standard basen, er en ortogonal matrix.
Matricen
er ortogonal for enhver vinkel .
9.4.1 QR dekomposition
Hvis vi benytter Gram-Schmidt algoritmen på søjlerne i en invertibel matrix fås Efter normalisering fås nu af Proposition 9.11 Oversat giver det matrix identiteten hvor er matricen med søjler og Læg mærke til at matricen er unitær fordi dens søjler udgør en ONB, samt at er en øvre trekantsmatrix (den har nuller under diagonalen). Vi har vist følgende.
En invertibel matrix kan skrives som produkt
af en unitær matrix og en øvre trekantsmatrix Hvis er en reel matrix, så kan vælges som en ortogonal matrix.
Matricen
er en invertibel matrix. Ved hjælp af Gram-Schmidt
algoritmen finder man med input fra søjlerne i , matricen
indeholdende ONB
med QR dekompositionen
9.4.2 Den mirakuløse QR-algoritme
Det meste lineære algebra er langtidsholdbart matematik og flere hundrede år gammelt. Det hænder dog at ekstremt vigtige nye opdagelser bliver gjort for eksempel ved at eksperimentere med computere. Følgende næsten halvnaive algoritme til at udregne egenværdier for en kvadratisk matrix blev opdaget sidst i 1950'erne. Den hedder QR algoritmen og bygger netop på QR dekompositionen.Indledningsvis sættes og algoritmen udregner nye QR dekompositioner i hvert trin med hensyn til det modsatte produkt af og fra foregående trin:Læg her mærke til at og har de samme egenværdier, fordi de er similære: Her har vi brugt at vi ved at den unitære matrix er invertibel. Under alle omstændigheder, hvis er en egenvektor til med egenværdi , så er en egenvektor til med den samme egenværdi . Oftest vil diagonalelementerne i konvergere mod egenværdierne i den oprindelige matrix .
Betragt matricen
Man kan ret hurtigt regne ud at har egenværdierne og .Lad os afprøve QR algoritmen rent numerisk på . De første trin giver
Eksperimentet synes at bekræfte at diagonalelementerne (markeret med rødt) i følgen af
de øvrige trekantsmatricer i QR dekompositionerne konvergerer mod
egenværdierne af den oprindelige matrix.
9.5 Ortogonal komplement og ortogonal projektion
Man har ofte brug for en anelse mere terminologi omkring underrum og ortogonalitet, herunder ortogonalt komplement og ortogonal projektion på et underrum. Dette er særlig vigtigt for at få en god geometrisk forståelse af hvad der foregår når man løser et ligningssystem, og det er helt essentielt for at forstå tilnærmelsesvise løsninger med mindste kvadraters metode i Kapitel 10.
For et underrum i knytter der sig et komplementært underrum med hensyn til
det indre produkt. Dette underrum er defineret ved
og kaldes det ortogonale komplement til .
Lad være et underrum af . For enhver vektor findes entydige vektorer og så
Formlen (9.6) kaldes den ortogonale dekomposition af med hensyn til og .
Lad være en ONB for , og definer
Vi har altså konstrueret en vektor ud fra . Nu bestemmer vi
Ved samme argument som ved Gram-Schmidt algoritmen, har vi at for . Da er ortogonal på en basis for , så må , da den derved står ortogonalt på enhver linearkombination af .Til sidst skal entydigheden af (9.6) bevises. Antag at
hvor og . Vi skal nu vise at og .Ved at se på det sidste lighedstegn i (9.7) får vi
Men dette betyder at , altså det er vektorer der står ortogonalt på sig selv. Som set nedenfor, er der kun en vektor der opfylder dette, nemlig nulvektoren
Dette betyder at , og vi har dermed vist og .
I den ortogonale dekomposition (9.6) kaldes for den ortogonale projektion af på . Tilsvarende er den ortogonale projektion af på .
Lad være et underrum af , og lad være den ortogonale projektion af på . Så gælder
Tallet kaldes afstanden fra til .Hvis er en ONB for , så kan projektionen udregnes ved
I Eksempel 9.12 betragtede vi underrummet af med
Bemærk igen at er en ONB for (tjek det efter, hvis du ikke allerede har gjort det!). I Eksempel 9.12 fandt vi
ud af at , hvor
Vi udregnede i eksemplet også
Denne vektor er den ortogonale projektion af på ved brug af Sætning 9.32.Vi har derfor at afstanden fra til er
Hvis havde været en vektor i , ville denne afstand naturligvis være , da i et sådan tilfælde ville .Lad os nu bestemme det ortogonale komplement . Da og , så må vi have , så vi skal finde en enkelt vektor der står ortogonalt på vektorerne i ; eller rettere, ortogonalt på basisvektorerne . I lige præcis dette tilfælde er vi heldige at , fordi vi ved hvordan man kan finde en vektor i , nemlig den ortogonale projektion af på ,
Så vi har .Men lad os prøve at gå systematisk til værks, og se hvordan man kunne bestemme hvis f.eks. . Vi har tre ligninger i spil , og . Hvis vi samler en matrix ud fra basisvektorerne for , , så kan disse ligninger lige præcis skrives
Vi ser nu at , så en basis for kan findes ud fra nulrummet af en matrix, ligesom vi kender det fra Kapitel 6.
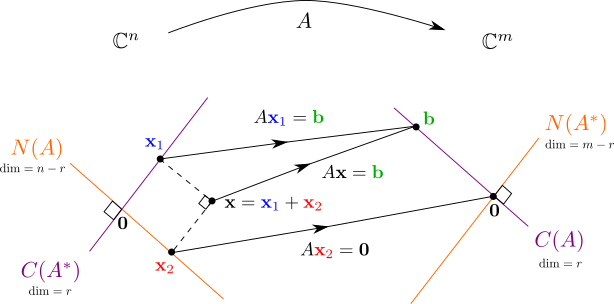
9.6 De fire fundamentale underrum
Som vi allerede så en indikation af i foregående eksempel, så er der en sammenhæng mellem søjlerummet af en matrix og nulrummet af .
For en matrix gælder
Lad (der findes en vektor så ) og lad (så ). Ved direkte udregning, og brug af Sætning 9.21, har vi
Så vi har at er en delmængde af . Nu skal vi tælle dimensioner, for at sætte lighedstegn mellem vektorrummene.Lad være en matrix med rang . Fra dimensionsætningen (Sætning 6.29) har vi at og . Hvis vi nu lader være en ONB for og være en ONB for , så har vi samlet set at udgør ortonormale vektorer i og derfor en ONB for . Dette betyder altså at .
9.7 Opgaver
Find den inverse til matricen
uden at regne.
Gør detaljeret rede for at
er en ortogonalbasis for underrummet
af . Normaliser basen og benyt derefter Proposition 9.11 (se også Eksempel 9.12) til at afgøre om
Find en ONB for underrummet
af .
Find dekomposition af
Gør rede for dine udregninger og metoder.
(Eksamen januar 2021)Lad være et underrum af , udspændt af vektorerne
- Gør rede for at , og er lineært uafhængige.
- Bestem en ortonormalbasis (ONB) for .
- Lad to vektorer og være givet ved Beregn ortogonal projektionerne af og på . På baggrund af dette, gør rede for hvilken af vektorerne eller der tilhører .
(Eksamen juni 2016)Betragt matricen
- Find baser for søjlerum og rækkerum . Hvad er deres dimensioner? Bestem nulrummet .
- Gør rede for, uden at udregne nulrummet , hvad er ud fra .
- Udregn en basis for .
- Find en ortonormalbasis (ONB) for det ortogonale komplement af i .