6Vektorrum
I dette kapitel begynder vi for alvor at introducere terminologien og grundstrukturen i lineær algebra, nemlig vektorrum, baser og koordinater. Det er grundstenene for senere at kunne formulere problemstillinger inden for linear algebra og kunne analysere løsninger og virkelig forstå faget. På grund af de mange nye begreber, og fordi det kan være svært med det samme at se relationen til anvendelser, vil dette også for manges vedkommende være et af de sværeste kapitler i kurset. Derfor er det særdeles vigtigt at I grundigt gennemgår eksemplerne undervejs for at opnå den nødvendige intuition.Det første vi introducerer er vektorrum. Her skelner man mellem vektorrum over reelle tal og vektorrum over komplekse tal . Men fordi de fleste resultater er identiske for de to typer af vektorrum, så vil vi bruge notationen til enten at betegne eller .6.1 Abstrakte og konkrete vektorrum
Inden vi kigger på de mere konkrete vektorrum, som vi hovedsagligt vil beskæftige os med i dette kursus, så nævner vi først de grundlæggende principper der ligger bag et generelt vektorrum.
Lad være en mængde. Lad og lad være vilkårlige. kaldes et vektorrum over såfremt der gælder:
- og kan defineres som elementer i .
- .
- .
- Der er et origo/nulvektor så og
- .
- .
- .
- .
6.1.1 Nogle konkrete eksempler på vektorrum
Hvis vi kigger lidt nærmere på definitionen af et vektorrum, så er det altså en struktur hvor det giver mening at lægge elementer sammen og gange med skalarer. Vi kender allerede eksempler på vektorrum, nemlig de reelle tal og komplekse tal . Andre velkendte eksempler er geometriske vektorer, f.eks. vektorer i planen og rummet som vi har diskuteret i Kapitel 1.Lidt mere generelt, så kan man tale om vektorrum af reelle eller komplekse matricer, som også betegnes eller . Nulvektoren for vektorrum af matricer er nulmatricen, som har nuller i alle dens indgange.Nogle andre eksempler kunne være vektorrum af funktioner. Eksempelvis er mængden af alle polynomier af grad højst et vektorrum, altså funktioner på formen hvor koefficienterne beskriver hvilket polynomium der er tale om. Addition for polynomierne sker på den mest naturlige måde, nemlig punktvis, det vil sige at for polynomier og , er funktionen med funktionsværdierne Det er nu klart at summen af to polynomier af grad højst , igen giver et polynomium af grad højst , da det svarer til at man lægger koefficienterne sammen. På samme punktvise måde kan man definere at gange med en skalar. Nulvektoren for et rum af polynomier er nulfunktionen, som svarer til at alle koefficienterne er nul, .Et mere kompliceret eksempel på et vektorrum af funktioner, men som er vigtigt inden for Fourieranalyse og signalbehandling, er rummet af kvadratisk integrable funktioner. Det vil sige funktioner på et interval så Det er måske lidt mere kompliceret at overbevise sig selv om, at summen af kvadratisk integrable funktioner igen giver en kvadratisk integrabel funktion; dette kaldes Minkowskis ulighed. Nulvektoren for dette vektorrum er også mere kompliceret, da det ikke bare er nulfunktionen, men i stedet er en ækvivalensklasse af alle funktioner som er lig med nul næsten over alt. Dette bunder i, at integraler ikke ''ser forskel'' på om en funktion er lig med nul over alt, eller om der er enkelte punkter med en anden funktionsværdi. Grunden til at kigge på en generel struktur, er at vi kan genbruge denne struktur uanset om der er tale om geometriske vektorer eller om der tale om funktioner, eller noget helt tredje. På denne måde slipper vi for at skulle gennem den samme teori igen og igen, og vi kan endda bruge vores intuition om eksempelvis ortogonalitet for vektorer i planen i en mere generel sammenhæng, hvilket også gør det lettere at lære disse begreber.6.1.2 Vektorrum af søjlevektorer
I dette kursus vil vi hovedsagligt fokusere på vektorrum bestående af søjlevektorer, svarende til matricer. En helt naturlig generalisering af vektorer i planen er søjlevektorer med indgange i : og tilsvarende har vi for komplekse søjlevektorer Samlet set vil betegne enten eller .6.2 Underrum, linearkombinationer og span
Overvej en linje gennem origo i rummet. Dette svarer til alle vektorerne der er parallelle med en enkelt vektor . Hvis vi lægger parallelle vektorer sammen skifter de ikke retning, men vil stadig ligge på denne samme linje. Dette er fordi at en linje der går gennem origo er et vektorrum!På præcis samme måde vil en plan i der skærer origo også være et vektorrum: Lægger man vektorer i sådan et plan sammen, forbliver det stadig i planen.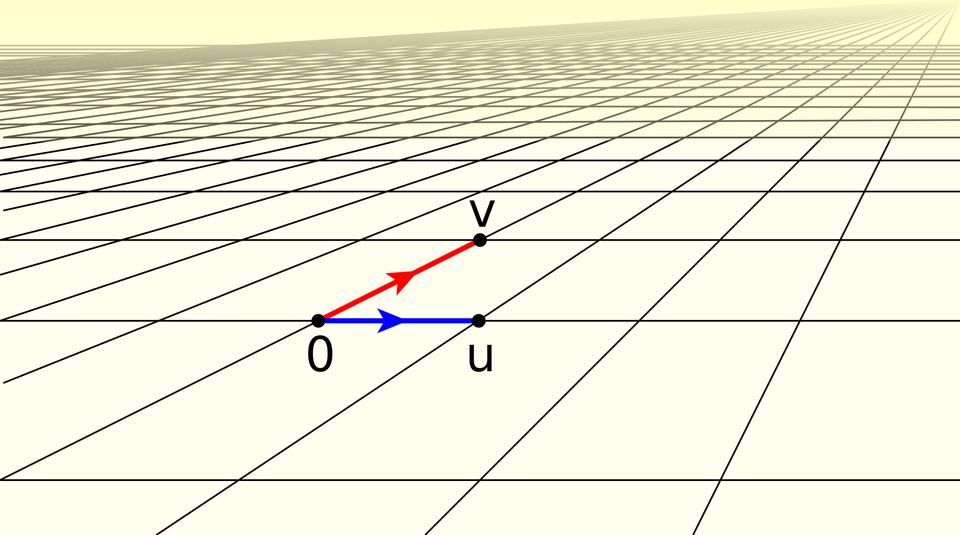
Lad være et vektorrum (f.eks. ). En ikke-tom delmængde kaldes et underrum af , hvis det for alle og opfylder:
- ,
- .
Et underrum af kan være af fire forskellige slags.
Et underrum arver egenskaberne fra Definition 6.1, da er en delmængde af . Betingelserne i Definition 6.2 viser at man nu kan erstatte med i den første betingelse af Definition 6.1, så længe at vektorerne kommer fra . Vi får også at origo, , ligger i fordi der må gælde at for en vektor . Det betyder faktisk at:
- Det kan bestå af kun origo, .
- Det kan være en linje der indeholder origo.
- Det kan være en plan der indeholder origo.
- Det kan være hele (som selvfølgelig automatisk indeholder origo).
Et underrum er også et vektorrum.
Hvilke af nedenstående udsagn er rigtige?
Punkterne på linjen i givet ved er et underrum af .
Et underrum af indeholder altid .
Hvis og , hvor er et underrum
af så vil
Punkterne på parablen i er et underrum af .
Betragt delmængden af
. For hvilke tal er et underrum af ?
.
.
.
6.2.1 Linearkombinationer og span af vektorer
Vi skal nu se på den mest almindelige måde at beskrive underrum på, nemlig ved linearkombinationer.
Lad være et vektorrum over (f.eks. ), og lad . Vi kalder
for en linearkombination af vektorerne , hvor er skalarer i .Mængden af alle linearkombinationer af kaldes spannet af vektorerne, og skrives
Lad os starte med et simpelt geometrisk eksempel. Overvej følgende vektorer i :
Så vil spannet af og bestå af alle vektorer i på formen
Vi har altså at
Dette er lige præcis punkterne i -planen. Lad os nu se på en anden vektor
Nu kan vi overveje spannet af og :
Det er måske lidt mindre tydeligt denne gang, men faktisk er dette også -planen. Hvis vi sætter og , så får vi lige præcis koordinaterne til punktet .Grunden til dette kommer af, at , det vil sige at ligger i , så vi kan ikke få ''nye'' vektorer som ikke allerede er udspændt af og , ved at tage linearkombinationer af og . Omvendt har vi også at . Faktisk har vi netop at
I næste afsnit skal vi se hvordan man finder det minimale antal vektorer der udspænder en mængde, ved at tjekke for lineær uafhængighed.
Betragt ligningen
hvor
. Denne ligning er opfyldt for?
Betragt nu vektorerne
Lad os undersøge om
Som ovenfor kan vi opstille ligningssystemet , hvor er matricen med søjler og . Fra totalmatricen får vi
hvor sidste række indikerer (hvorfor gør den det?). Ligningssystemet har ikke en løsning og dermed gælder .
Der er tale om en relativt abstrakt definition i Definition 6.6 og det er en rigtig
god ide at forbinde den til de konkrete forhold i den følgende opgave.
Lad
være vektorer i . Forklar hvorfor
det vil sige hvorfor alle vektorer i er linearkombinationer af og .Lad nu
være vektorer i . Hvordan afgør man om i dette tilfælde?
En helt fundamental observation er, at spannet ikke ændrer sig ved
operationer svarende til rækkeoperationerne for en matrix, ligesom vi også så i Eksempel 6.7.
Lad være vektorer i et vektorrum (f.eks. ) og lad
hvor .
Så gælder at ikke ændres ved følgende modifikationer til spannet:
- Ombytning af vektorer:
- Multiplikation af en vektor med et tal :
- Addition af et multiplum af en vektor til en anden vektor:
Vi beviser kun (iii), da beviserne for (i) og (ii) er tilsvarende (men lettere).Lad os kalde
Vi starter nu med at se på en linearkombination fra vektorerne der definerede :
Vi har altså at . Omvendt, lad os overveje en linearkombination fra vektorerne der definerede :
Vi har altså at . Samlet set har vi vist at , eller rettere .
Hvis er vektorer i et vektorrum (f.eks. ), så er
et underrum af .
Lad være vektorer i et vektorrum .
- Forklar hvorfor Eventuelt start med eller .
- Argumenter for hvorfor er et underrum af ud fra Definition 6.2.
6.3 Lineær uafhængighed
De to vektorer er specielle i og med at ingen af dem kan udelades fra uden at bliver mindre eller ændres (fra til -aksen eller -aksen). Det er helt anderledes med for eksempel vektorerne Her ændres ikke hvis en af dem udelades. Her er vektorerne parallelle, og vi får derfor ikke nye vektorer i spannet ved at anvende begge disse vektorer.Mere kompliceret bliver det hvis vi har flere vektorer , da det ikke længere er nok at tjekke om nogle af vektorerne er parallelle, men rettere om nogle af vektorerne er linearkombinationer af de andre.
Lad være vektorer i et vektorrum (f.eks. ).
- Overvej følgende linearkombination der giver nulvektoren: Vektorerne kaldes lineært uafhængige hvis den eneste mulighed for linearkombinationen (6.1) er for
- Hvis er et underrum af og vi danner matricen , så er vektorerne lineært uafhængige hvis og kun hvis kun har nulløsningen (ingen frie variable).
- Hvis vektorerne ikke er lineært uafhængige, så kaldes de i stedet lineært afhængige.
Hvilke af nedenstående påstande er rigtige?
Vektorerne
og
i er lineært uafhængige.
Vektorerne
og
i
er lineært uafhængige.
Vektorerne
og
i
er lineært uafhængige.
Vektorerne
og
i
er lineært uafhængige.
Vektoren
i ligger i
Vektoren
i
ligger i
Betragt vektorerne
i . For at afgøre om de er lineært uafhængige skal vi
ifølge Definition 6.14 undersøge ligningssystemet
Vi kan ret hurtigt se at RREF for systemmatricen er
Derfor er en fri variabel. Med bliver
og i fin overensstemmelse med at
Derfor er vektorerne ikke lineært uafhængige.Vi har dog, ved at udelade den sidste af søjlerne i ligningssystemet, at vektorerne og er lineært uafhængige.
6.4 Basis og koordinatvektor
Vi tager nu et skridt videre fra lineær uafhængighed, til at tale om baser for vektorrum. Som tidligere nævnt i dette kapitel, så kan vektorrum bestå af andet end søjlevektorer, men vi ønsker stadig at kunne anvende teorien fra matrixregning til eksempelvis at løse ligningssystemer indenfor disse vektorrum. Dette kræver en konsekvent måde at gå mellem abstrakte vektorer og koordinater i linearkombinationer, hvor disse koordinater er almindelige tal i . Derudover, selv hvis vi arbejder med vektorrum af søjlevektorer, så kan det ofte være brugbart at beskrive dem i et andet koordinatsystem. Dette er faktisk helt essentielt for anvendelser, og bliver mere tydeligt i de kommende kapitler.Begge disse problemstillinger løses med baser.
Lad være et vektorrum (f.eks. ).
- En mængde af vektorer kaldes en basis for , hvis vektorerne er lineært uafhængige og
- For en linearkombination af basisvektorer kaldes vektoren for koordinatvektoren for med hensyn til basen .
- Hvis er et vektorrum af søjlevektorer, kan vi skrive som en matrix. Så findes koordinatvektoren som løsning til ligningssystemet
For kaldes mængden af vektorerne
for standard basen. Det svarer til søjlerne i identitetsmatricen .
Man kan måske undre sig over, hvorfor man nogensinde skulle have brug for andre baser end standard basen når man undersøger vektorer i . For det første er der underrum af som slet ikke indeholder nogen af standard basisvektorerne, og så må man jo klare sig uden; eksempelvis linjen givet ved indeholder ikke nogen af - eller -akserne. En anden årsag kommer vi til i Kapitel 7, hvor vi skal bruge baser til at repræsentere lineære transformationer ved hjælp af matricer. Standard basen giver sjældent pæne matricer i sådan nogle matrixrepræsentationer, og her kommer vi i Kapitlerne 8, 11 og 12 til at se hvordan vi kan finde optimale baser, så vi kan opnå matrixrepræsentationer som er diagonalmatricer.
Forklar helt præcist hvorfor
er en basis for .
Lad os betragte vektorerne
Det oplyses at udgør en basis for . Vi kan derfor også tænke på som matricen med søjler , og .Vi ønsker nu at finde koordinatvektoren for vektoren
Fra Definition 6.17 skal vi derfor løse ligningssystemet . Vi sætter totalmatricen på RREF:
Dermed er , hvilket er i fin overensstemmelse med at
Matricen er invertibel, så man kunne også en gang for alle finde , i tilfælde af at man skal udregne flere koordinatvektorer.Det blev påstået i starten af eksemplet at er en basis. Det næste resultat nedenfor siger at det er nok at finde tre lineært uafhængige vektorer i for at de udgør en basis. Fra RREF ovenfor så vi blandt andet også at disse tre vektorer er lineært uafhængige.
Følgende resultat er specifikt for endelig dimensionelle vektorrum, hvilket er de vektorrum vi undersøger i dette kursus. Det er et helt centralt begreb, som først siger at forskellige baser for det samme vektorrum altid består af det samme antal vektorer. Anden del siger, at hvis vi kender dette antal (dimensionen), så er det nok at tjekke om vektorerne er lineært uafhængige for at få en basis. Dem der senere skal have Fourieranalyse vil også støde på uendelig dimensionelle vektorrum, hvor begrebet gør dette mere kompliceret.
Hvis og er to baser for et vektorrum , så er .Antallet af vektorer i en basis for kaldes dimensionen af og skrives .Hvis så vil enhver mængde med lineært uafhængige vektorer i udgøre en basis.
Det er nok at vise at , fordi med samme bevis kan vi også vise at .
Vi argumenterer ved modstrid. Det vil sige, vi antager at , og viser at dette fører til en
modstrid mod forudsætningen at og begge er baser for .Til at begynde med bruger vi at vektorerne danner en basis, så at vi kan skrive
Nu opstiller vi et ligningssystem med ubekendte og ligninger, med systemmatricen (bemærk at elementerne for 'te række af er ganget på ovenfor):
Da findes der af Sætning 3.10 en løsning til dette ligningssystem som ikke er nulløsningen. Lad være en sådan løsning.
Vi definerer nu en vektor . Nu er tiden kommet til at bruge at også er en basis, fordi det betyder jo at
da dens koordinatvektor . På den anden side, ved at indsætte udtrykkene for og samle bidragene fra , så får vi
Dette giver en modstrid mod antagelsen at såvel som er en basis, og første del af sætningen er bevist.Til anden del af sætningen, antag at og at er en basis for . Hvis så ved vi at deres span også er i . Vi vil nu vise resultatet ved modstrid, så antag at er lineært uafhængige men ikke udspænder . Så findes derfor en en vektor således at er lineært uafhængige. Men fra beviset ovenfor hvor erstattes af , får vi en modstrid. Derfor må udspænde .
Der gælder noget særligt om vektorrummet som kun består af origo. Dette vektorrum har dimension . Hvis vi igen ser på underrum af så er bare punktet , mens et underrum af dimension 1 er en linje gennem origo, et underrum af dimension er en plan der skærer origo, og hele har dimension
6.5 Nulrum, søjlerum og rækkerum for matricer
Vi vender nu tilbage til at undersøge matricer, fordi der er nogle helt fundamentale underrum som knytter sig til enhver matrix.
Lad være en matrix med tal i . Nulrummet for er givet ved
Søjlerummet for er givet ved
Søjlerummet for har også et navn, dette kaldes rækkerummet for .
Nogle stedet bruges notationen for rækkerummet. Det gør vi ikke her, da det kan skabe forvirring hvis man læser amerikanske bøger hvor nogle gange bruges for søjlerummet, og de to må ikke forveksles. Her står for range hvilket oversat til et dansk matematisk term betyder billedmængden. Vores notation i Definition 6.24 er blevet mere almindeligt brugt de senere år.
For en matrix med tal i , vis at er et underrum af og at er et underrum af . At er et underrum af svarer til beviset for men med den transponerede matrix, så det dropper vi. Hint
Søjlerummet indeholder præcis de vektorer som kan rammes af , det vil sige de vektorer som er linearkombinationer af søjlerne i . Det betyder også, at et ligningssystem
har en løsning hvis og kun hvis , fordi så findes netop en vektor der opfylder (6.2). Søjlerummet beskriver derved alle tænkelige højresider som giver anledning til et løsbart ligningssystem.Nulrummet er også vigtigt når man løser ligningssystemer. En vektor tilhører præcis hvis . Hvis er en løsning til (6.2) og så må gælde
Det vil sige at også er en løsning til (6.2), og hvis så er der tale om en ny løsning. Samtidig ved vi også, at hvis og er løsninger til (6.2), så vil gælde
så vektoren må tilhøre . Samlet set har vi, at vektorer i kan lægges til en løsning for at skabe nye løsninger, samt at differencen på løsninger altid vil ligge i . Det betyder at kan bruges til at opskrive samtlige løsninger til (6.2), såfremt vi har fundet en enkelt løsning. Mere præcist svarer til at beskrive de frie variable til (6.2).
Det er nødvendigt at bruge at og .
Lad være en matrix og dens RREF. Så har og identiske nulrum og rækkerum.Vi kan finde baser på følgende måde:
- Søjlerne i svarende til pivotsøjlerne i (samme søjlenummer), udgør en basis for .
- Rækkerne i som er udgør en basis for .
- En basis for kan findes fra den fuldstændige løsning af , ved at udtrække vektorer med bidraget fra hvert af de frie variable.
Der findes en invertibel matrix (produkt af elementærmatricer) så . Da er
invertibel ses at holder hvis og kun hvis
Dette oversættes umiddelbart til at . Ud fra RREF indses at vi kan skrive løsninger op til ved brug af de frie variable. En vektor kan opskrives fra hver fri variabel, f.eks. , svarende til at isolere den i ligningssystemet og sætte ; i den fuldstændige løsning har man linearkombinationer af disse vektorer, lad os kalde dem . Hver af disse vektorer vil have en indgang med et (svarende til søjlenummeret for den frie variabel) og de resterende vil have i samme indgang. Derfor er disse vektorer lineært uafhængige og udspænder .På samme måde får vi at , hvor
og dermed er . Da rækkerne i som er er lineært uafhængige (hver pivotsøjle har kun en indgang forskellig fra 0), så gælder af Sætning 6.22 at disse rækker udgør en basis for .Det var nemt nok. Det er lidt mere indviklet at vise påstanden om søjlerummet . Hvis og , så har vi at
Den sidste notation betyder, at vi ganger på alle elementerne i spannet. Men vi ved jo også, at er det samme som spannet af pivotsøjlerne. Ved at gange på pivotsøjlerne giver nu de tilsvarende søjler i . Dette svarer til de bundne variable som fra RREF er lineært uafhængige af Definition 6.14, og udgør derfor en basis for på grund af Sætning 6.22.
Lad
Først rækkereducerer vi til RREF:
Sidste matrix er på RREF, lad os kalde den . Nu ved vi fra
Sætning 6.27 at og . De bundne variable
er og , og de frie er og . Det vil sige at et typisk element i
har formen
for vilkårlige tal og . Bemærk -tallerne på pladserne for de frie variable, som viser at man får lineært uafhængige vektorer. Heraf fremgår det at
er en basis for .Fra rækkerne i aflæser vi en basis for til at være
Læg mærke til at vi gik fra at have rækkerummet som span af
vektorer (de rækker (transponeret) i ) til et span af
kun vektorer.Pivotsøjlerne er de første to søjler i , så de første to søjler af
udgør en basis for . Igen ser vi, at vi går fra et span på 4 søjlevektorer i , til kun at have brug for for at beskrive en basis.
Det er faktisk ikke tilfældigt at søjlerum og rækkerum begge havde dimension 2 i Eksempel 6.28, ligesom det heller ikke var tilfældigt at summen af dimensionerne for søjlerum og nulrum gav det samme som antal søjler i matricen. Dette er nemlig den såkaldte dimensionssætning nedenfor.Hvis man tænker lidt nærmere over Sætning 6.27, vil man indse at relaterer til antal bundne variable og til antal frie variable, hvilket til sammen giver antallet af søjler i .
Lad være en matrix. Så gælder
- ,
- .
Find RREF af matricen
og angiv dimensionerne for søjlerum og nulrum.
6.6 Mere om rangen af en matrix
I næste store revision af noterne vil her komme et afsnit om resultater for rangen af matrixprodukter ud fra rangen af og .6.7 Opgaver
Lad være standard basen for . Hvis
er et underrum af og alle ligger
i , hvorfor gælder så at ?
Er
en basis for ? Som sædvanlig: Begrund dit svar.
Lad
Find baser for og som underrum af .
Lad være en matrix med rang . Hvad kan du sige om
? Opskriv et eksempel på en matrix med disse
egenskaber.
(Eksamen april 2015)Betragt matricen
- Find RREF af .
- Angiver baser for rækkerummet og søjlerummet for .
- Angiv en basis for nulrummet af .
- Afgør om vektoren ligger i søjlerummet for .
(Eksamen januar 2018)Lad
være en reel matrix.
- Gør rede for at er invertibel og bestem med angivelse af metode og udregninger.
- Forklar hvorfor er en basis for .
- Bestem koordinaterne til vektoren i basen ovenfor.