10Mindste kvadraters metode
10.1 Mindste kvadraters metode
Mindste kvadraters metode kendes nok bedst fra problemet om at bestemme den bedste rette linje gennem nogle punkter i planen. Faktisk er den langt mere generel og drejer sig om at finde approksimative løsninger til overbestemte ligningssystemer. Metoden blev opfundet af Gauss og brugt første gang i forbindelse med bestemmelse af baner for himmellegemer ud fra tre observationer. Det er ikke altid at et ligningssystem med en matrix og har en løsning, og det er heller ikke altid at denne løsning er entydig. Hvis for eksempel er meget større end , det vil sige at der er mange flere ligninger end ubekendte, og hvis og er ''tilfældige'', så vil med overvældende sandsynlighed gælde følgende to ting:- Ligningen har ikke nogen løsning.
- Den homogene ligning har kun den ene løsning .
Ligningssystemet
har ingen løsninger da højresiden ikke ligger i søjlerummet for systemmatricen.
Nøglen til at approksimativt løse et ligningssystem ligger i de såkaldte normalligninger.Som vi efterhånden er blevet bekvemme med, så ved vi at nulrummet er vigtigt for at kunne opskrive løsninger til et ligningssystem. Det første vi indser, er at nulrummet for systemmatricen i normalligningerne er præcis det samme som i det oprindelige ligningsystem.
For enhver matrix gælder at .
Lad os starte med en vektor , altså . Så har vi også
så . Lad os nu overveje , så mangler vi at vise at dette medfører at . Til dette formål kigger vi nu på normen af :
Dette viser at , og derfor at som vi skulle vise.
Overvej ligningssystemet hvor er en matrix og .
- Der findes mindst én mindste kvadraters løsning .
- Alle mindste kvadraters løsninger er givet ved hvor .
- Hvis nulrummet af er trivielt, dvs. , så er invertibel og den entydige mindste kvadraters løsning er givet ved
Vi får brug for en ortogonal dekomposition af
hvor og . Dette betyder blandt andet at .Det at betyder lige præcis at der eksisterer en vektor der opfylder
Vi kan nu gange med , for at indse at faktisk er en mindste kvadraters løsning:
Nu hvor vi har fundet en løsning til (10.1), så kan samtlige mindste kvadraters løsninger opskrives på formen hvor , hvilket fra Lemma 10.3 er ensbetydende med at . Dette medfører både resultaterne i (ii) og (iii).
- Fra dimensionssætningen (Sætning 6.29) ved vi at nulrummet for er trivielt hvis og kun hvis rangen af matricen er . Det vil sige når alle søjlerne i er lineært uafhængige.
- Beviset for Sætning 10.4 gemmer på en meget vigtig intuition omkring mindste kvadraters løsninger: De er lige præcis løsningerne til hvor er den ortogonale projektion af på . Det vil sige at man udskifter højresiden i ligningssystemet med en vektor , der ligger tættest muligt på den oprindelige højreside , men garanterer at det nye ligningssystem har en løsning.
10.2 Hvorfor kaldes det mindste kvadraters metode?
Som det blev nævnt i Bemærkning 10.5, så svarer mindste kvadraters løsningerne til at løse et nyt ligningssystem med en projiceret højreside. Det viser sig, at dette netop svarer til at løse et minimeringsproblem.
Hvis er en mindste kvadraters løsning til , så opfylder
Lad være en matrix. Vi har at hvor er ortogonal projektionen af på . Fra Sætning 9.32 ved vi at dette betyder
Nu skal vi bruge at afbilder hele over på , altså kan vi erstatte med hvor :
10.3 Eksempler
Lad os begynde med et konkret eksempel.
Lad
I Eksempel 10.1 blev det nævnt at ikke har nogen løsning. Lad os i stedet finde mindste kvadraters løsninger.Først har vi
hvilket giver
Vi ser hurtigt at determinanten af er , så der er en entydig mindste kvadraters løsning. Vi kan med fordel anvende formlen for den inverse af en matrix:
En almindelig anvendelse af mindstre kvadraters løsninger er datafitting.
Den helt klassiske anvendelse af mindste kvadraters løsninger er at finde den bedste
linje gennem nogle givne punkter
i planen .At det oftest ikke er muligt at finde en perfekt linje, som går gennem alle punkterne kan
oversættes til at ligningssystemet
ikke har løsninger. Her kan vi så arbejde med en mindste kvadraters løsning, som giver
den bedste linje gennem punkterne i den forstand at summen af
den vertikale kvadratafstand fra linjen til -erne
bliver minimal.
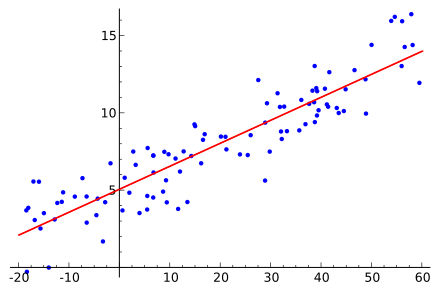
Bedste fit af linje til tilfældige punkter fra Wikipedia.
Faktisk kunne vi ligeså godt have spurgt om den bedste parabel
gennem punkterne
i . Dette ville med samme metode give os ligningssystemet
og mindste kvadraters løsningen til dette ligningssystem ville give
den bedste parabel gennem punkterne med summen af den vertikale
kvadratafstand fra parablen til punkterne minimeret.
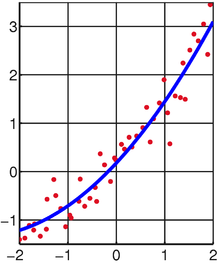
Bedste fit af parabel til tilfældige punkter fra Wikipedia.
Helt generelt kan den samme metode bruges til at finde det bedste
fit af et 'te gradspolynomium
til en række punkter i planen.For at gå endnu videre, kan man ved samme princip fitte givne funktioner til datapunkter i planen, ved at bruge
Den hovedsaglige antagelse er, at de ubekendte koefficienter indgår lineært i udtrykket.
10.4 Opgaver
Find den bedste mindste kvadraters linje gennem
punkterne og ved at benytte Sætning 10.4.
En cirkel med centrum i og radius i planen har ligningen
- Gør rede for hvordan (10.5) kan omskrives til ligningen hvor .
- Forklar hvordan (10.6) i mindste kvadraters kontekst leder frem til ligningssystemet i forsøget på at tilpasse en cirkel til punkterne i planen.
- Find den bedste cirkel i mindste kvadraters forstand gennem
punkterne
ved at angive centrumkoordinaterne og radius med to decimaler.
- Diskuter hvornår der går en entydig cirkel gennem tre givne punkter og i henhold til egenskaber ved matricen
- Kan man finde en cirkel gennem tre ikke-sammenfaldende punkter, som ligger på en linje?
(Eksamen januar 2021)Lad være en funktion med forskrift
Her er og ubekendte reelle tal.
- Opskriv et ligningssystem til bestemmelse af de ubekendte , således at grafen for gennemløber følgende fire punkter i planen:
- Lad en vektor være givet ved Vis at er ortogonal på søjlerne i , og vis at hvor er en af søjlerne i . Gør rede for hvorfor dette betyder at ligningssystemet ikke har løsninger.
- Beregn determinanten , og vis at
- Bestem tallene , og som mindste kvadraters løsning til .