7Basisskifte og lineære transformationer
I dette kapitel skal vi undersøge hvordan lineære funktioner mellem vektorrum (lineære transformationer) kan beskrives ved matricer, samt hvordan valg af basis kan bruges til at give forskellige matrixrepræsentationer; nogle pænere end andre. Eksempelvis repræsenterer matricerne den samme underliggende lineære transformation. Heraf er det klart at foretrække diagonalmatricen. Den første matrixrepræsentation har brugt standard basen for , mens den anden har gjort brug af basen I Kapitlerne 8, 11 og 12 skal vi se hvordan man kan vælge ''optimale'' baser, så vi får diagonalmatricer.Inden vi kommer så langt, og inden vi definerer lineære transformationer og deres matrixrepræsentationer, så skal vi se hvordan vi kan lave basisskifte.7.1 Basisskifte
Forskellige baser for det samme vektorrum kan bruges til at beskrive vektorer . Vi kunne have to baser i spil, og og vi husker at for hver basis så vil have en koordinatvektor, som beskriver gennem linearkombinationer af basisvektorerne: Her har vi koordinatvektorerne og med hensyn til baserne og . Selv når man har abstrakte vektorrum, så vil koordinatvektorerne være søjlevektorer med tal i , så selvom vi i dette kursus mest ser på underrum af , så er princippet det samme for eksempelvis vektorrum af polynomier: Det vigtigste at tage med herfra, er at når vi regner med baser er der altid tale om regning på koordinatvektorer.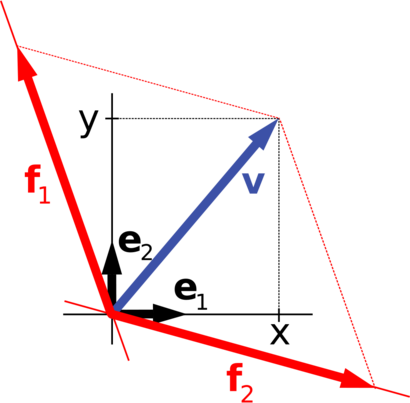
Lad og være to
baser for et vektorrum . Basisskiftmatricen fra til
er matricen givet ved
Det er altså matricen hvis søjler er koordinatvektorerne for basen med hensyn til basen .
- Basisskiftematricen fra Definition 7.1 er den entydige matrix der opfylder for enhver vektor .
- Matricen er invertibel, og er basisskiftematricen fra til .
- Hvis (så ), kan vi skrive og som matricer. Så kan bestemmes ved matricen i øverste højre hjørne af RREF fra følgende totalmatrix hvor antal nulrækker i RREF er .
- Hvis kan findes ved
Vi starter med entydigheden. Antag at der er to matricer og der opfylder (7.2). Så har vi at for alle , hvilket kun opfyldes af nulmatricen, så .Vi udtrykker basisvektorerne i via basisvektorerne i :
Så er . Vi sætter derefter (7.5) ind i (7.1):
Ved nu at samle bidragene fra hver -vektor i (7.6) får vi koordinaterne for i
basen som
Hvis vi skriver , så at
, får vi altså
Herved ses at matrixmultiplikationen giver koordinaterne for i basen , da koordinatvektorer er entydigt bestemt.Lad være basisskiftematricen fra til , så er det klart at vi har . Derved er invertibel og .Hvis er vektorrum af søjlevektorer, og vi lader og være matricer med basisvektorerne som søjler, kan vi bestemme koordinatvektorerne ved at løse ligningssystemerne
for hvert . Disse ligningssystemer løses samlet ved hjælp af (7.3). Da er entydigt bestemt får man en RREF på den angivne form.Hvis så er invertibel. Matricen består nemlig af lineært uafhængige søjler, så dets nulrum er trivielt, og ved RREF fås identitetsmatricen Nu er (7.3) det samme som .
Det betaler sig at se et helt konkret eksempel på anvendelsen af
Proposition 7.2.
Lad
være to baser for . Eller skrevet på matrixform:
Vi kan udregne basisskiftematricen fra til ved brug af (7.4):
Lad os tage en konkret vektor
Så er koordinatvektoren med hensyn til givet ved . Vi kunne også have fundet koordinatvektoren som løsning til . Nu kan vi let finde koordinater med hensyn til , blot ved at gange med :
Vi kan tjekke efter, ved at opskrive linearkombinationen i basis , og se om vi får vektoren fra (7.7):
Hvis koordinaterne i basen
til en vektor
er , hvad gælder så om koordinaterne
til vektoren i basen
.
.
7.2 Lineære transformationer
Nu skal vi se på nogle afbildninger (funktioner) mellem vektorrum, som har nogle af de samme egenskaber som matricer. Hvis og er vektorrum, så bruger vi notationen til at fortælle at er en funktion med definitionsmængde og med funktionsværdier i . Eksempelvis kunne vi have og som indikerer at funktionen afbilder punkter i planen til punkter i rummet. kunne her eksempelvis have forskriften Så vil , , og så videre. Selv hvis definitionsmængden er søjlevektorer, her , så vil vi af notationsmæssige årsager stadig skrive enten eller for i stedet for . Vi er særligt interesserede i afbildninder der er lineære.
Lad hvor og er vektorrum over . Så kaldes en lineær transformation hvis for alle og der gælder
Det er ekstremt vigtigt at bemærke at en lineær transformation er
entydigt bestemt ud fra dens værdier
på en basis for . Hvis vi kalder koordinaterne for for følger dette ved at bruge
linearitetsegenskaberne i Definition 7.5:
Hvis man også har en basis for , og ved hvordan man kommer fra koordinatvektoren til koordinatvektoren for enhver vektor , så har man en fuld beskrivelse af givet ved hjælp af koordinatvektorer.
Lad os tage en quiz i at undersøge om en afbildning er en lineær transformation.
Hvilke af nedenstående påstande er rigtige?
Afbildningen givet ved er en
lineær transformation.
Afbildningen givet ved er en
lineær transformation.
Afbildningen givet ved er en
lineær transformation.
Afbildningen givet ved
er
en lineær transformation.
7.2.1 Repræsentation ved en matrix
Nu kommer vi til et meget centralt punkt i disse noter: sammenhængen mellem matricer og lineære afbildninger. Vi vil gerne kunne sige at ''en lineær afbildning er det samme som en matrix'', og det er ikke helt forkert, men det er heller ikke helt rigtigt, og for at komme videre er man nødt til at forstå hvorfor. Den lille, men vigtige, forskel er at vi har brug for at vælge baser!
Lad være en lineær transformation mellem vektorrum og . Hvis er en basis for og er en basis for , så kaldes matricen
for matrixrepræsentationen af med hensyn til og . Det er altså matricen hvis søjler er koordinatvektorerne for med hensyn til basen .
- Matricen fra Definition 7.7 er den entydige matrix der opfylder for enhver vektor .
- Hvis og (så og ), kan vi opskrive som en matrix. Hvis vi kalder for matricen , så kan bestemmes ved matricen i øverste højre hjørne af RREF fra følgende totalmatrix hvor antal nulrækker i RREF er .
- Hvis og , kan findes ved
Entydigheden vises på samme måde som i beviset for Proposition 7.2.Første del af beviset er næsten det samme, som vi så i beviset af Proposition 7.2. Vi udtrykker via basisvektorerne i :
Så er . Lad nu , så har vi også for og ved brug af linearitet:
Vi sætter derefter (7.11) ind i (7.12):
Ved nu at samle bidragene fra hver -vektor i (7.13) får vi koordinaterne for i
basen som
Hvis vi skriver , så at
, får vi altså
Herved ses at matrixmultiplikationen giver koordinaterne for i basen , da koordinatvektorer er entydigt bestemt.Hvis og er vektorrum af søjlevektorer, kan vi bestemme koordinatvektorerne ved at løse ligningssystemerne
for hvert . Ved at samle matricen kan disse ligningssystemer løses samlet ved hjælp af (7.9).Hvis er et ægte underrum, eksempelvis et to-dimensionelt underrum af , vil matricen for ikke være kvadratisk. Dog ved vi at der altid eksisterer en entydig løsning til systemerne (7.14) da , samt at koordinatvektorer i en basis altid eksisterer og er entydigt bestemt.
Lad med basis givet ved
Og lad med basis givet ved
Bemærk at er et to-dimensionelt underrum af . Nu ønsker vi at finde en matrixrepræsentation for givet ved
med hensyn til baserne og . Tjek gerne på nuværende tidspunkt at giver en vektor i for hvert , samt at er en lineær transformation.Først finder vi og :
Vi kan nu samle matricerne og og anvende (7.9):
Vi ved nu at matrixrepræsentationen er givet ved matricen øverst til højre i RREF (det vil nemlig være en matrix):
Vi kan altid lave et tjek, for at se om vi har regnet rigtigt. Vi tager en konkret vektor i brug:
Der er derfor koordinatvektorer og , hvilket heldigvis er helt i overensstemmelse med matrixrepræsentationen og Proposition 7.8:
Antag at den lineære transformation , hvor
og er givet
ved
Hvad er matricen som repræsenterer med hensyn til
I diskussionen efter Definition 7.5 var et eksempel på en lineær transformation mellem vektorrum af polynomier, f.eks. . Vi kan udstyre med basen bestående af polynomierne og med basen ; prøv at overveje hvorfor disse rent faktisk er baser.Koordinatvektoren for er , mens for er .Differentiationen af viser at
Vi ser at . Tilsvarende er og . Vi kan derfor repræsentere med matricen
svarende til at
Lad os differentiere ved hjælp af matrix-vektor multiplikation:
hvilket fra basen giver polynomiet . Dette er naturligvis en meget simpel anvendelse af en matrixrepræsentation, og det bliver mere interessant når disse indgår i ligningssystemer.
Prøv at gennemgå eksemplet ovenfor, men hvor vi ser på den lineære transformation med , svarende til
Vis at matrixrepræsentationen af i baserne og er
Hvis man i stedet bruger baserne og får man
7.3 Sammensætning af lineære transformationer
Når man har matrixrepræsentationer vil man ofte gerne blive ved med at anvende disse til udregninger, da det ofte er lettere at regne på matricer. Vi skal nu se, at matrixmultiplikation svarer til at sammensætte to lineære transformationer.Det sker at vi har tre vektorrum og to lineære transformationer og . Så kan vi definere en sammensat lineær transformation ved
Lad og være givet ved
og
Her er og matrixrepræsentationerne for og i standard baserne.Vi kan nu finde tilsvarende matrixrepræsentationer for og :
Tilsvarende har vi matrixrepræsentationerne og for og i standard baserne. Det finurlige er nu, at og .Denne sammenhæng er ikke tilfældig, og vi behøvede heller ikke at anvende standard baser for at det går op. Så længe at samme basis bruges på i matrixrepræsentationerne og får man , og hvis samme basis bruges på fås . Dette resultat er givet nedenfor.
Lad være vektorrum med baser . Lad og være lineære transformationer. Hvis er matrixrepræsentationen for i baserne og , samt er matrixrepræsentationen af i baserne og , så er
matrixrepræsentationen af i baserne og .
Vi regner i koordinater. Lad , så er , og vi har
og
Dermed har vi at er matrixrepræsentationen af i baserne og .
Dette forklarer faktisk meget fint, hvorfor matrixmultiplikationen er defineret som den er. Det hele handler om repræsentationer af lineære transformationer og at kunne sammensætte disse. Dette gør det også mere klart at den associative lov gælder for matrixprodukter, , da dette er sandt for sammensætning af afbildninger.Vi skal naturligvis også se, hvordan man skifter mellem baser i matrixrepræsentationer. Nøglen til dette er, måske ikke så overraskende (navnet taget i betragtning), at gange med basisskiftematricer. Hvis vi har nogle faste baser vi skal arbejde med, så kan vi altså en gang for alle udregne basisskiftematricer mellem disse, og så kan man altid gå frem og tilbage mellem forskellige baser for sine matrixrepræsentationer. Dette er nogle gange meget brugbart i anvendelser, hvor algoritmer kan være designet til at bruge udvalgte baser.
Lad være en lineær transformation mellem vektorrum og . Antag at:
- og er to baser for .
- og er to baser for .
- er matrixrepræsentation for i baserne og .
- er basisskiftematrix fra til .
- er basisskiftematrix fra til .
Vi vender nu tilbage til eksemplet i starten af kapitlet. Lad
Dette er eksempelvis matrixrepræsentationen af givet ved i standard basen (på begge vektorrum). Men der blev også nævnt en anden basis
Vi kan samle denne basis i en matrix
Basisskiftematricen fra til standard basen er bare matricen , mens basisskiftematricen fra standard basen til er matricen . Derfor giver Proposition 7.15 at
er matrixrepræsentationen af med hensyn til basen (på begge vektorrum).
Som vi ser i Eksempel 7.16, så er det ikke altid en god ide at anvende standard basen, hvis man ønsker sig en flot matrixrepræsentation. Især i anvendelser er det vigtigt at få så mange nuller i sin matrix som muligt. Vi skal se videre på at finde optimale baser i Kapitlerne 8, 11 og 12, hvor begreber som egenværdier og egenvektorer bliver en essentiel ingrediens.7.4 Opgaver
Lad , hvor være givet ved
Find matrixrepræsentationen af med hensyn til baserne for og for , givet ved
(Eksamen marts 2017)Betragt følgende produkt af reelle matricer (du behøver ikke tjekke det)
Definer nu følgende tre vektorer i :
- Vis at udgør en basis for .
- Beregn koordinatvektoren med hensyn til for en vilkårlig vektor i .
- Herefter betragtes vektorerne Det oplyses at er en basis for (skal ikke tjekkes). Find basisskiftematricen fra basis til basis .
(Eksamen juni 2016)Betragt mængden bestående af vektorerne
i .
- Gør rede for at udgør en basis for .
- Betragt som en matrix. Den inverse matrix er lig med for et tal . Find tallet og skitser din metode for at nå frem til det.
- Lad være givet ved den lineære transformation Find matrixrepræsentationen for i basen (brugt på begge vektorrum).
(Eksamen maj 2021)Lad tre vektorer , og være givet ved
- Gør rede for at er en basis for .
- Find koordinater for nedenstående tre vektorer , og med hensyn til basen :
- Lad være en basis for (skal ikke bevises), hvor Lad være en lineær transformation (skal ikke bevises), givet ved Bestem matrixrepræsentationen af med hensyn til baserne og .
- Find koordinaterne til , og med hensyn til basen .